Test 1 IT– Création d'une classe pour un robot
Ce test porte sur la conception, l'implémentation et la documentation d'une architecture orientée objet autour d'une classe Robot principale, socle de l'ensemble des développements robotiques du projet TEKBOT.
1. Contexte
La robotique occupe aujourd'hui une place centrale dans l'innovation technologique, combinant informatique, électronique et mécanique pour concevoir des systèmes intelligents capables d'interagir avec leur environnement. Ce projet s'inscrit dans le cadre du Tekbot Robotics Challenge 2025 et constitue l'épreuve d'introduction à la partie informatique du concours.
Il s'agit de concevoir et d'implémenter une architecture orientée objet autour d'une classe Robot principale, qui servira de base à l'ensemble des développements robotiques à venir. La démarche vise à initier les étudiants à la modélisation logicielle, à la structuration de code et à la réflexion sur l'architecture logicielle dans un contexte robotique.
L'accent est mis sur la compréhension des concepts fondamentaux de la programmation orientée objet et leur application concrète dans un projet technique.
2. Objectifs
Les objectifs sont :
- Concevoir une classe Robot respectant les principes de la programmation orientée objet : encapsulation, héritage, polymorphisme
- Implémenter au moins deux sous-classes spécialisées dérivées de la classe Robot
- Redéfinir la méthode
move()dans les sous-classes pour illustrer le polymorphisme - Assurer une encapsulation correcte des attributs (attributs privés, getters/setters)
- Fournir une documentation UML claire et conforme
3. Structure du projet
Le projet TEKBOT est organisé selon une architecture modulaire fidèle à l'arborescence réelle du dossier :
tekbot_classes/
├── __init__.py
├── action/
│ ├── __init__.py
│ ├── actionneur.py
│ ├── action_system.py
│ ├── bras_robotique.py
│ └── moteur.py
├── core/
│ ├── __init__.py
│ ├── position.py
│ ├── robot.py
│ └── robot_mobile.py
├── gestion_dechets/
│ ├── __init__.py
│ ├── dechet.py
│ └── gestionnaire_stockage.py
├── intelligence/
│ ├── __init__.py
│ ├── gestionnaire_energie.py
│ ├── ia.py
│ ├── intelligence_system.py
│ └── systeme_navigation.py
├── perception/
│ ├── __init__.py
│ ├── camera.py
│ ├── capteur.py
│ ├── gyroscope.py
│ ├── perception_system.py
│ └── temperature.py
└── ui/
├── __init__.py
└── ihm.py4. Programmation Orientée Objet - Implémentation Complète
Le projet TEKBOT illustre les grands principes de la POO à travers une architecture modulaire et réaliste. Voici une explication pédagogique de chaque concept, accompagnée d'exemples concrets issus du code du projet.
4.0 LE CONSTRUCTEUR – Initialisation des Objets
Définition détaillée : Le constructeur est une méthode spéciale d'une classe (en Python, __init__) qui est appelée automatiquement lors de la création d'un nouvel objet. Il permet d'initialiser les attributs de l'objet avec des valeurs de départ, garantissant que chaque instance commence dans un état cohérent.
Exemple dans le projet :
class Robot:
def __init__(self, nom: str, energie: float = 100.0):
self._nom = nom
self._energie = energie
self._etat = "prêt"Le constructeur __init__ initialise ici le nom, l'énergie et l'état du robot dès sa création.
4.1 ENCAPSULATION – Protection et Contrôle
Définition détaillée : L'encapsulation est le principe qui consiste à regrouper les données (attributs) et les méthodes qui manipulent ces données au sein d'une même entité (la classe). Elle protège l'état interne de l'objet en rendant certains attributs privés (préfixe _ ou __), accessibles uniquement via des méthodes publiques appelées accesseurs (getters) et mutateurs (setters). Cela permet de contrôler la modification des données et d'éviter les incohérences.
Exemple dans le projet :
class Capteur(ABC):
def __init__(self, id_capteur: str, type_capteur: str):
self._id = id_capteur.strip() # Attribut privé
self._type = type_capteur.strip() # Attribut privé
self._valeur = 0.0 # Attribut privé
def get_valeur(self) -> float:
return self._valeur
def set_valeur(self, v: float):
if v >= 0:
self._valeur = v
else:
raise ValueError("Valeur invalide")Ici, les attributs sont protégés et l'accès se fait via des méthodes dédiées, garantissant la cohérence des valeurs.
4.2 HÉRITAGE – Réutilisation et Spécialisation
Définition détaillée : L'héritage permet de créer une nouvelle classe (dite « fille » ou « dérivée ») à partir d'une classe existante (dite « mère » ou « de base »). La classe fille hérite des attributs et méthodes de la classe mère, ce qui favorise la réutilisation du code et la spécialisation. Elle peut aussi redéfinir ou étendre certains comportements.
Exemple dans le projet :
class Robot(ABC):
# Classe abstraite de base
class RobotMobile(Robot):
def __init__(self, nom: str, vitesse: float):
super().__init__(nom) # Appel du constructeur parent
self._vitesse_max = float(vitesse)La classe RobotMobile hérite de Robot et ajoute des fonctionnalités spécifiques liées à la mobilité.
4.3 POLYMORPHISME – Flexibilité et Extensibilité
Définition détaillée : Le polymorphisme permet d'utiliser la même interface (méthode ou attribut) pour des objets de types différents. Chaque sous-classe peut redéfinir la méthode héritée pour adapter son comportement. Ainsi, le même appel de méthode peut produire des effets différents selon l'objet ciblé.
Exemple dans le projet :
class Capteur(ABC):
@abstractmethod
def lire_valeur(self):
pass
class Camera(Capteur):
def lire_valeur(self):
# Spécifique à la caméra
pass
class Gyroscope(Capteur):
def lire_valeur(self):
# Spécifique au gyroscope
pass
# Utilisation polymorphique
capteurs = [Camera(...), Gyroscope(...)]
for capteur in capteurs:
capteur.lire_valeur() # Appelle la méthode adaptée à chaque typeLa même méthode (lire_valeur) est appelée sur chaque objet, mais le comportement dépend de la sous-classe concrète.
4.4 ABSTRACTION – Simplification et Modularité
Définition détaillée : L'abstraction consiste à définir des classes ou méthodes sans implémentation concrète (classes ou méthodes abstraites). Elle impose un contrat aux sous-classes, qui devront fournir leur propre implémentation. Cela permet de structurer le code et de clarifier les responsabilités de chaque classe.
Exemple dans le projet :
from abc import ABC, abstractmethod
class Robot(ABC):
@abstractmethod
def move(self):
pass # Doit être redéfinie dans les sous-classesLa classe Robot impose la présence de la méthode move() dans ses sous-classes, sans en donner le détail.
4.5 COMPOSITION & AGRÉGATION – Construction d'objets complexes
Définition détaillée : La composition et l'agrégation sont des relations qui permettent de construire des objets complexes à partir d'autres objets. La composition implique que l'objet composé possède et gère le cycle de vie de ses composants ; l'agrégation indique une relation plus souple, où les objets peuvent exister indépendamment.
Exemple dans le projet :
class ActionSystem:
def __init__(self):
self._actionneurs: Dict[str, Actionneur] = {}
self._moteurs: List[Moteur] = []
self._bras_robotiques: List[BrasRobotique] = []La classe ActionSystem est composée d'objets Moteur, BrasRobotique et Actionneur : elle orchestre leur fonctionnement.
5. Technologies et Outils Utilisés
5.1 Langages et Outils de Développement
- Python 3.11+ — Langage principal pour l'architecture orientée objet et la logique métier
- Pygame 2.6+ — Simulation graphique interactive et visualisation robotique
- VS Code — Environnement de développement moderne et modulaire
5.2 Architecture, Modélisation et Organisation
- PlantUML — Génération de diagrammes UML (classes, séquence, activités, cas d'utilisation)
- Design Patterns — Singleton, Observer, Strategy, State pour la robustesse logicielle
- Architecture modulaire — Séparation claire des responsabilités en packages Python
6. Collection Complète des Diagrammes UML
La modélisation UML du projet TEKBOT s'appuie sur plusieurs types de diagrammes, chacun ayant un objectif précis dans la compréhension et la documentation du système.
6.1 Diagramme de Classes Principal (avec packages)
Définition : Le diagramme de classes UML représente la structure statique du système : il montre les classes, leurs attributs, méthodes, ainsi que les relations (héritage, composition, agrégation, associations) entre elles.
Objectif : Offrir une vue d'ensemble de l'architecture logicielle, faciliter la compréhension des interactions entre modules et guider l'implémentation du code.

💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
Points clés illustrés :
- Héritage : Robot → RobotMobile, BrasRobotique
- Composition : Robot contient PerceptionSystem, ActionSystem
- Agrégation : Robot utilise Navigation, GestionnaireStockage
- Polymorphisme : Méthodes virtuelles redéfinies
- Encapsulation : Attributs privés + méthodes publiques
6.2 Diagramme de Classes (sans packages)
Définition : Ce diagramme de classes simplifié présente uniquement les classes principales et leurs relations, sans la structure de packages.
Objectif : Permettre une compréhension rapide des relations d'héritage, de composition et d'agrégation entre les classes majeures du projet.

💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
6.3 Diagramme de Séquence - Interaction Dynamique
Définition : Le diagramme de séquence UML décrit l'enchaînement temporel des messages échangés entre objets lors d'un scénario précis.
Objectif : Illustrer le déroulement dynamique d'un cas d'utilisation, clarifier la logique d'exécution et détecter d'éventuels problèmes de synchronisation ou de conception.

💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
Séquence illustrée :
Le diagramme présente l'enchaînement complet d'une mission de collecte : initialisation du robot et de ses systèmes, perception de l'environnement via les capteurs, analyse IA et prise de décision, navigation vers le déchet détecté, collecte via le bras robotique, puis stockage et tri automatique.
6.4 Diagramme d'Activités - Flux de Traitement
Définition : Le diagramme d'activités UML modélise les flux de contrôle et de données d'un processus métier ou d'un algorithme.
Objectif : Comprendre et optimiser les processus, identifier les points de décision et les alternatives, et documenter les scénarios complexes.

💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
Ce diagramme illustre le déroulement complet d'une mission TEKBOT : démarrage, exploration, gestion de l'énergie, collecte priorisée et conditions d'arrêt. Les branches conditionnelles et boucles de traitement permettent d'anticiper les cas particuliers et d'optimiser les processus avant implémentation.
6.5 Diagramme de Cas d'Utilisation - Interactions Utilisateur
Définition : Le diagramme de cas d'utilisation UML présente les différents acteurs (utilisateurs ou systèmes externes) et les fonctionnalités principales auxquelles ils ont accès.
Objectif : Identifier les besoins fonctionnels, clarifier le périmètre du système et faciliter la communication entre les parties prenantes.

💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
Acteurs et cas d'usage :
- Opérateur : Lancer mission, surveiller état, arrêter robot
- Technicien : Configurer paramètres, maintenance, diagnostics
- Superviseur : Analyser performances, générer rapports
- Robot (Acteur système) : Exécution autonome des tâches
6.6 Diagramme de Déploiement - Architecture Physique
Définition : Le diagramme de déploiement UML décrit l'architecture physique du système, montrant comment les composants logiciels sont déployés sur l'infrastructure matérielle.
Objectif : Visualiser la distribution géographique des composants, identifier les dépendances matérielles et faciliter la planification du déploiement.
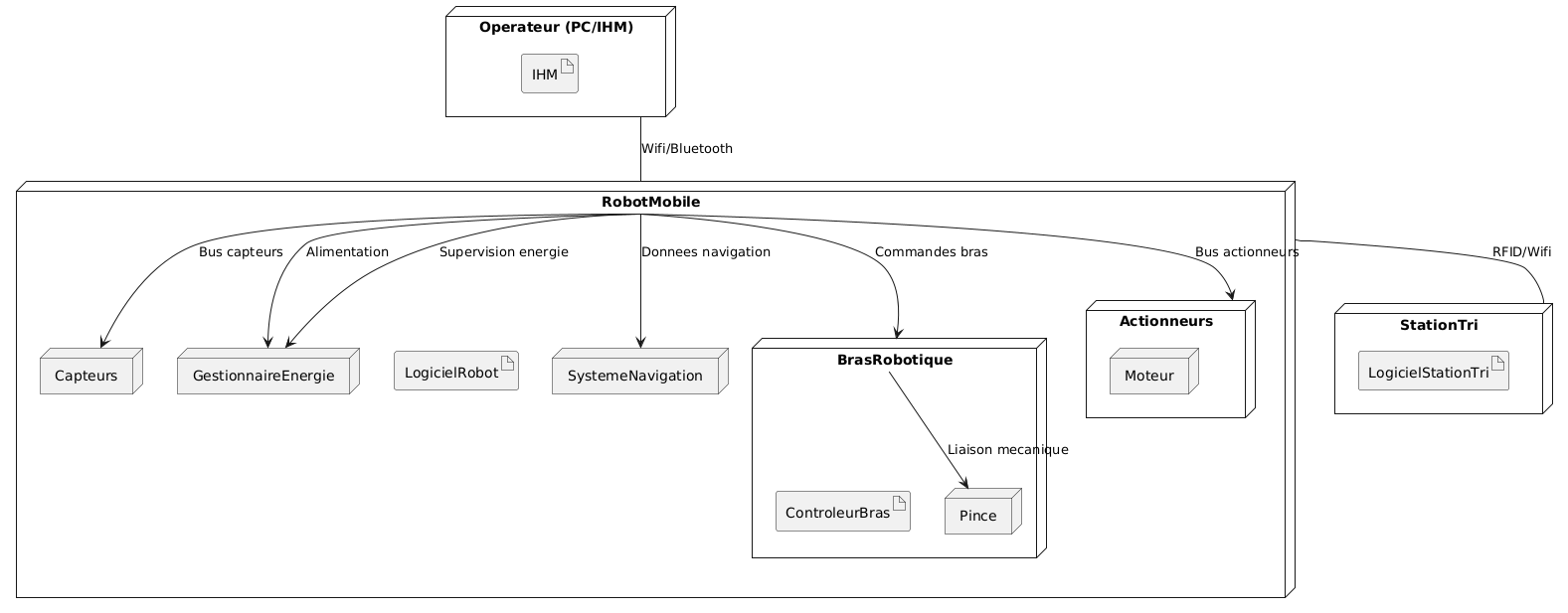
💡 Cliquez sur l'image pour zoomer • Utilisez le bouton retour ou fermez l'onglet pour revenir
Éléments représentés :
- Nœuds physiques : Serveurs, ordinateurs, appareils mobiles, capteurs
- Composants déployés : Applications, bases de données, services web
- Connexions : Réseaux, protocoles de communication, dépendances
Architecture TEKBOT :
- Nœud central : Raspberry Pi avec système de contrôle principal
- Nœuds périphériques : Capteurs, actionneurs, caméras
- Communication : Bus I2C, SPI, interfaces série
- Alimentation : Gestion centralisée de l'énergie
7. Justification détaillée et rôle stratégique des 19 classes du projet
La conception du projet TEKBOT repose sur une architecture orientée objet rigoureuse, où chaque classe joue un rôle précis et indispensable dans la robustesse, la modularité et l'intelligence du système.
Robot (Abstraite)
Sert de socle à toute l'architecture : elle définit les attributs et méthodes essentiels (identité, énergie, état, interface de mouvement) et impose un contrat commun à toutes les variantes de robots. Elle garantit la cohérence, la sécurité et la possibilité d'extension par héritage, tout en favorisant le polymorphisme et la factorisation du code.
RobotMobile
Spécialise la classe Robot pour la mobilité : elle gère la navigation autonome, la planification de chemin, l'orientation et la gestion dynamique de la vitesse. Elle illustre l'héritage, la redéfinition de méthodes et permet d'intégrer des algorithmes avancés de déplacement (A*, évitement d'obstacles, etc.).
BrasRobotique
Représente le sous-système de manipulation : elle encapsule la logique de préhension, de collecte et de tri des objets. Sa séparation permet d'ajouter ou de modifier les capacités de manipulation sans impacter le cœur du robot, illustrant la composition et l'extensibilité matérielle.
Actionneur
Abstraction de tout dispositif effectuant une action physique (moteur, pince, bras, etc.). Elle favorise la réutilisation, la maintenance et l'ajout de nouveaux actionneurs, tout en garantissant une interface commune pour le contrôle des éléments matériels.
Moteur
Spécialise l'actionneur pour la propulsion : elle gère la vitesse, le sens de rotation et la puissance. Elle permet d'isoler la logique de déplacement mécanique et d'optimiser la gestion énergétique du robot.
ActionSystem
Centralise et orchestre tous les actionneurs : elle applique le pattern façade pour simplifier l'interface de contrôle, permet de coordonner plusieurs dispositifs physiques et d'assurer la cohérence des actions du robot.
PerceptionSystem
Système central de gestion des capteurs : il réalise la fusion des données, la détection d'événements et l'analyse de l'environnement. Il permet d'ajouter facilement de nouveaux capteurs et d'optimiser la perception globale du robot.
Camera
Capteur spécialisé pour la vision : elle gère la capture d'images, la détection d'objets et l'analyse visuelle. Elle est essentielle pour la navigation intelligente et la reconnaissance de l'environnement.
Gyroscope
Capteur d'orientation : il mesure les rotations, stabilise la navigation et permet au robot de s'adapter aux changements de direction ou de terrain.
Temperature
Capteur thermique : il surveille la température de l'environnement ou des composants internes, permettant la détection de surchauffe ou d'anomalies, et contribue à la sécurité du robot.
Capteur
Classe abstraite pour tous les capteurs : elle impose une interface commune, garantit la cohérence des lectures et facilite l'ajout de nouveaux types de capteurs sans modifier le reste du système.
IntelligenceSystem
Cerveau décisionnel du robot : il analyse les données, planifie les missions, applique des stratégies d'IA et prend des décisions en temps réel pour optimiser le comportement du robot.
IA
Module d'intelligence artificielle : il permet d'expérimenter différentes approches (systèmes experts, apprentissage, adaptation) et d'implémenter des comportements évolués pour le robot.
SystemeNavigation
Système dédié à la planification de chemin, à l'évitement d'obstacles et à la gestion des déplacements complexes. Il rend la navigation autonome, fiable et optimisée.
GestionnaireEnergie
Supervise la consommation, la recharge et l'optimisation de l'autonomie énergétique : il permet au robot d'adapter son comportement en fonction de son niveau d'énergie et d'éviter les pannes.
Dechet
Modélise chaque déchet détecté : elle stocke ses propriétés (type, position, état), permet le tri, la gestion intelligente et la traçabilité des déchets collectés par le robot.
GestionnaireStockage
Gère le stockage, le tri et la capacité des déchets collectés : elle optimise la logistique embarquée, prévient les débordements et assure la bonne organisation des déchets.
IHM
Interface Homme-Machine : elle permet l'interaction utilisateur, la visualisation en temps réel et le contrôle du robot, rendant le système accessible et pilotable.
Position
Représente la position spatiale : elle est utilisée pour la navigation, la détection, la gestion des déplacements et la simulation graphique. Elle constitue la base de toute logique spatiale dans le projet.
8. Extraits de code des classes principales
Le code complet de ces classes est disponible dans le dossier tekbot_classes/ du projet. Voici un aperçu de la classe Robot de base :
class Robot(ABC):
"""
Classe abstraite Robot - Classe mère pour tous les types de robots.
Énumération intégrée EtatRobot selon le diagramme UML.
Utilise les principes d'abstraction et de composition.
"""
class EtatRobot(Enum):
"""
Énumération des états possibles du robot intégrée dans la classe Robot.
"""
ARRET = auto()
ACTIF = auto()
COLLECTE = auto()
TRI = auto()
LIVRAISON = auto()
MAINTENANCE = auto()
ECONOMIE_ENERGIE = auto()
def __init__(self, nom: str):
if not nom or not isinstance(nom, str):
raise ValueError("Le nom du robot doit être une chaîne non vide")
self._nom = nom.strip()
self._etat = Robot.EtatRobot.ARRET
self._energie = 100.0
self._mode_manuelle = False
# === MÉTHODES SELON LE DIAGRAMME UML ===
def demarrer(self) -> None:
if self._etat == Robot.EtatRobot.ARRET:
self._etat = Robot.EtatRobot.ACTIF
else:
raise RuntimeError(f"Impossible de démarrer le robot - état actuel: {self._etat}")
def arreter(self) -> None:
self._etat = Robot.EtatRobot.ARRET
@abstractmethod
def move(self) -> None:
passCode complet
Le code source complet avec tous les getters/setters, la gestion des systèmes et la documentation détaillée est disponible dans le dépôt du projet.
9. Simulation visuelle et prise en main
Objectif pédagogique
La simulation TEKBOT permet d'expérimenter et de visualiser le comportement du robot dans un environnement virtuel interactif. Elle favorise la compréhension concrète des algorithmes de navigation, de collecte et de gestion d'énergie.
Comment lancer la simulation
Assurez-vous d'avoir Python 3.11+ et Pygame installés
Ouvrez un terminal dans le dossier du projet
Lancez la simulation avec la commande suivante :
bashpython main_tekbot_simulation.py
Observez l'évolution de la mission, la collecte des déchets et la gestion de l'énergie en temps réel.
Vidéos de démonstration
10. Références et Ressources
Documentation Technique
- Documentation Python 3 - Référence officielle du langage
- Documentation Pygame - Bibliothèque graphique utilisée
- PlantUML Guide - Outil de génération des diagrammes UML
Ressources Pédagogiques
- POO avec Python - OpenClassrooms
- UML Diagrams Reference - Guide complet UML
- Real Python - OOP Guide