Test 3 Electronique: Test de sortie - Afficheur 7 segments mécanique avec servomoteurs
Afficheur 7 segments mécanique réinventé à l'aide de servomoteurs - Une fusion de la logique numérique et du mouvement mécanique.
Contexte du projet
Dans un monde dominé par les écrans numériques et les LED, le Tekbot Robotic Challenge 2025 lance un défi audacieux: réinventer l'afficheur 7 segments en lui donnant une âme mécanique.
Origine du projet: TEKBOT ROBOTIC CHALLENGE 2025
Objectifs du projet
Objectifs principaux
- Concevoir un afficheur 7 segments entièrement mécanique
- Contrôler précisément 7 servomoteurs avec un microcontrôleur
- Implémenter un comptage cyclique 0→9→0
Objectifs secondaires
- Réduire le nombre de broches en utilisant des circuits intégrés
- Documenter le processus de développement
- Valider la solution par simulation
Partie 1: Implémentation physique
Composants utilisés
| Composant | Référence | Quantité | Rôle |
|---|---|---|---|
| Microcontrôleur | ATmega328P | 1 | Cerveau du système |
| Servomoteurs | SG90 | 7 | Contrôle des segments |
| Régulateur | LM7805 | 1 | Régulation 5V |
| Batterie | Li-ion 7.4V | 1 | Alimentation |
| Condensateurs | 100nF, 1000μF, 10µF | 4 | Filtrage |
| Cristal | 16MHz | 1 | Horloge |
Schéma électronique
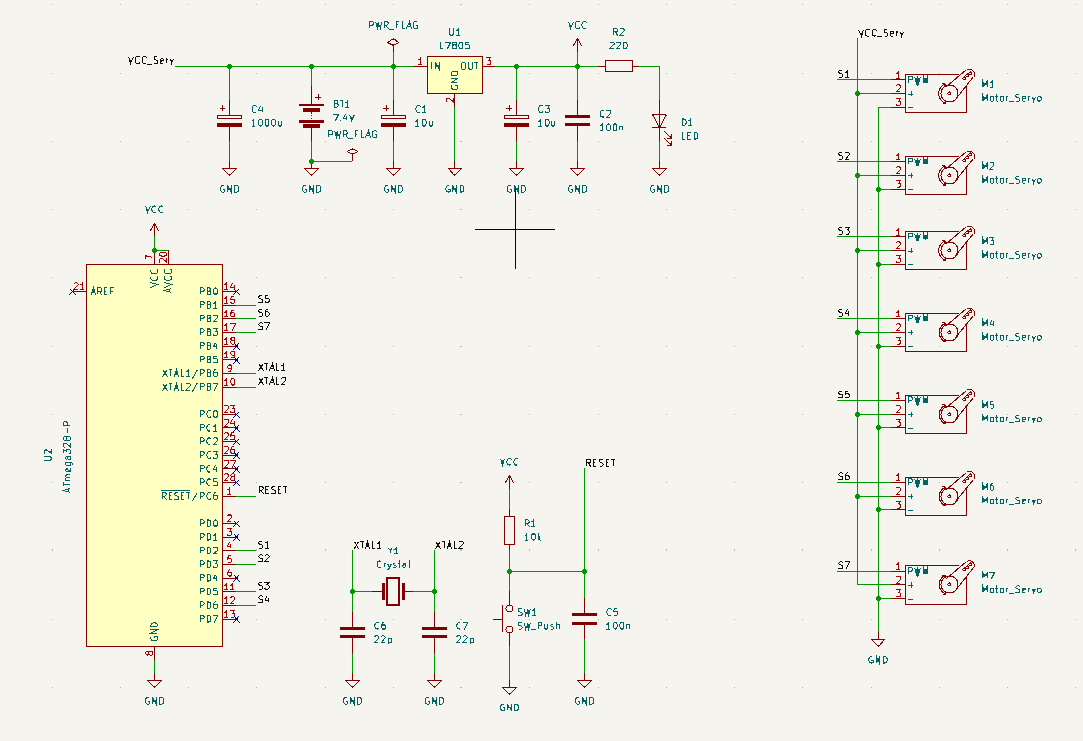
Description:
- Protection contre la surcharge
- Connexion directe des servos aux broches PWM
- Circuit de réinitialisation avec bouton poussoir

Alimentation
Le système d'alimentation comprend:
- Batterie Li-ion 7.4V 2S: Source d'énergie principale
- Régulateur LM7805: Stabilisation à 5V pour les composants
- Condensateurs de filtrage: 100nF et 10μF pour lisser l'alimentation
Réalisation du PCB
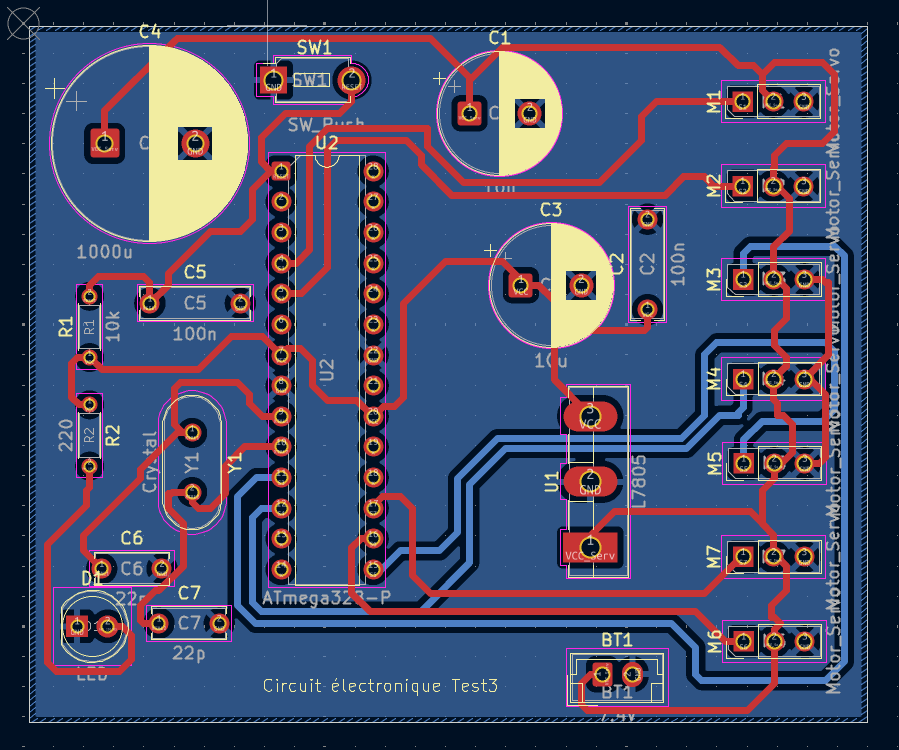
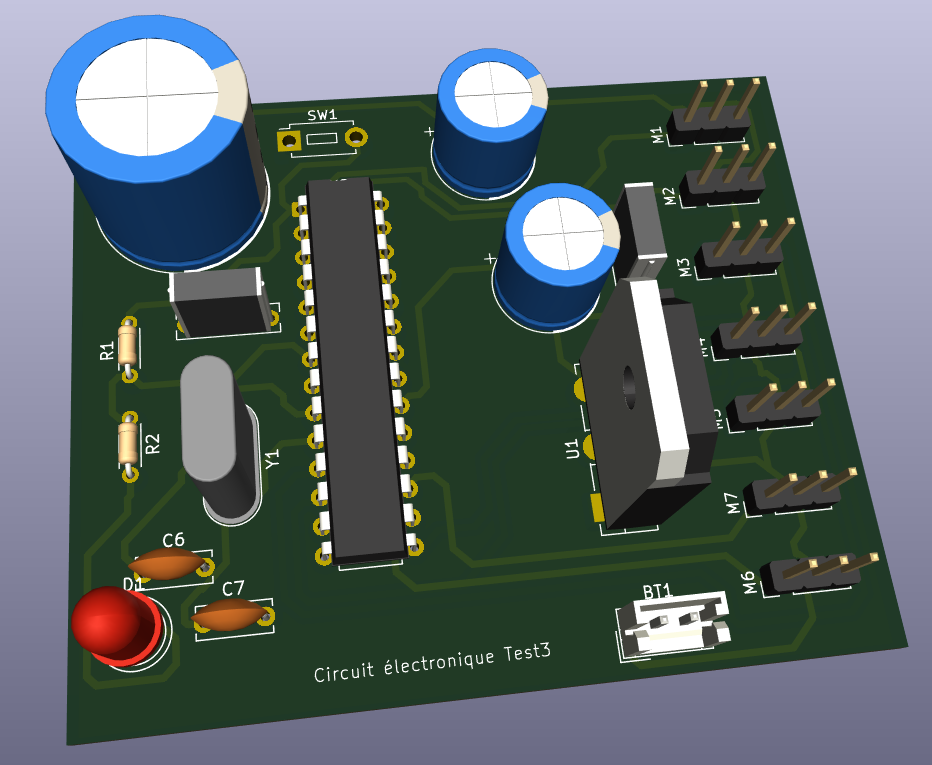
Caractéristiques:
- Conçu avec KiCad
- Double face
- Pistes de 0.6 mm
- Espacement optimisé pour les connecteurs
📥 Télécharger les fichiers PCB
Code Arduino
Extrait du code principal utilisant millis() pour un timing non-bloquant:
// Initialisation progressive des servos
if (!initTerminee) {
if (millis() - debutInit >= 100) { // Délai entre les servos
debutInit = millis();
servoEnCours++;
if (servoEnCours < 7) {
segments[servoEnCours].attach(brochesServos[servoEnCours]);
segments[servoEnCours].write(90);
} else {
initTerminee = true;
afficher(chiffreActuel); // Affichage initial 0
}
}
}Partie 2: Innovation théorique
Concepts clés
- Contrôle angulaire précis: Chaque servo doit atteindre un angle spécifique pour afficher correctement chaque segment.
- Synchronisation des servos: Les servos doivent être synchronisés pour éviter les erreurs d'affichage.
Défis théoriques
- Calculer les délais optimaux pour le contrôle des servos.
- Modéliser le comportement dynamique du système pour un contrôle prédictif.
Comparaison et avantages
| Critère | Afficheur 7 segments traditionnel | Afficheur 7 segments avec servomoteurs |
|---|---|---|
| Flexibilité | Faible | Élevée |
| Complexité de contrôle | Faible | Élevée |
| Coût | Faible | Élevé |
| Maintenance | Simple | Complexe |
| Innovation | Standard | Haute |
Problèmes rencontrés
- Problème: Difficulté à synchroniser les servos pour un affichage précis.
- Solution: Ajustement des délais dans le code et utilisation de la fonction millis() pour un timing non-bloquant.
Références techniques
Conclusion
Ce projet a permis d'explorer les limites de l'afficheur 7 segments traditionnel en intégrant des éléments mécaniques. Bien que des défis subsistent, notamment en termes de coût et de complexité, les résultats obtenus ouvrent la voie à de nouvelles innovations dans le domaine des afficheurs numériques.